Tag assembler

Trabajando con delays o rutinas de demora
En este post muestro el circuito, el diagrama de flujo, el código y la implementación de un programa en lenguaje ensamblador en el microcontrolador PIC 16F886 para realizar una temporización...
Comparación de números
En este post muestro el circuito, el diagrama de flujo, el código y la implementación de un programa en lenguaje ensamblador en el microcontrolador microcontrolador PIC 16F886 para realizar una...
Implementación de subrutinas: AND y OR
En este post muestro el circuito, el diagrama de flujo, el código en lenguage ensamblador y la implementación de un programa para que el microcontrolador PIC 16F886 realice de forma...
Tag StepperMotors
Drive 28BYJ-48 Stepper Motor with ULN2003 driver activating 2 coils and the BeagleBone Black
In this post, I show how to drive the stepper motor 28BYJ-48 in full step mode activating 2 coils with the driver ULN2003. In this entry, you can find more...
Drive 28BYJ-48 Stepper Motor with ULN2003 driver and the BeagleBone Black
In this post, I show how to drive the stepper motor 28BYJ-48 with the driver ULN2003 which can drive a wide range of loads including solenoids, relay DC motors, LED...
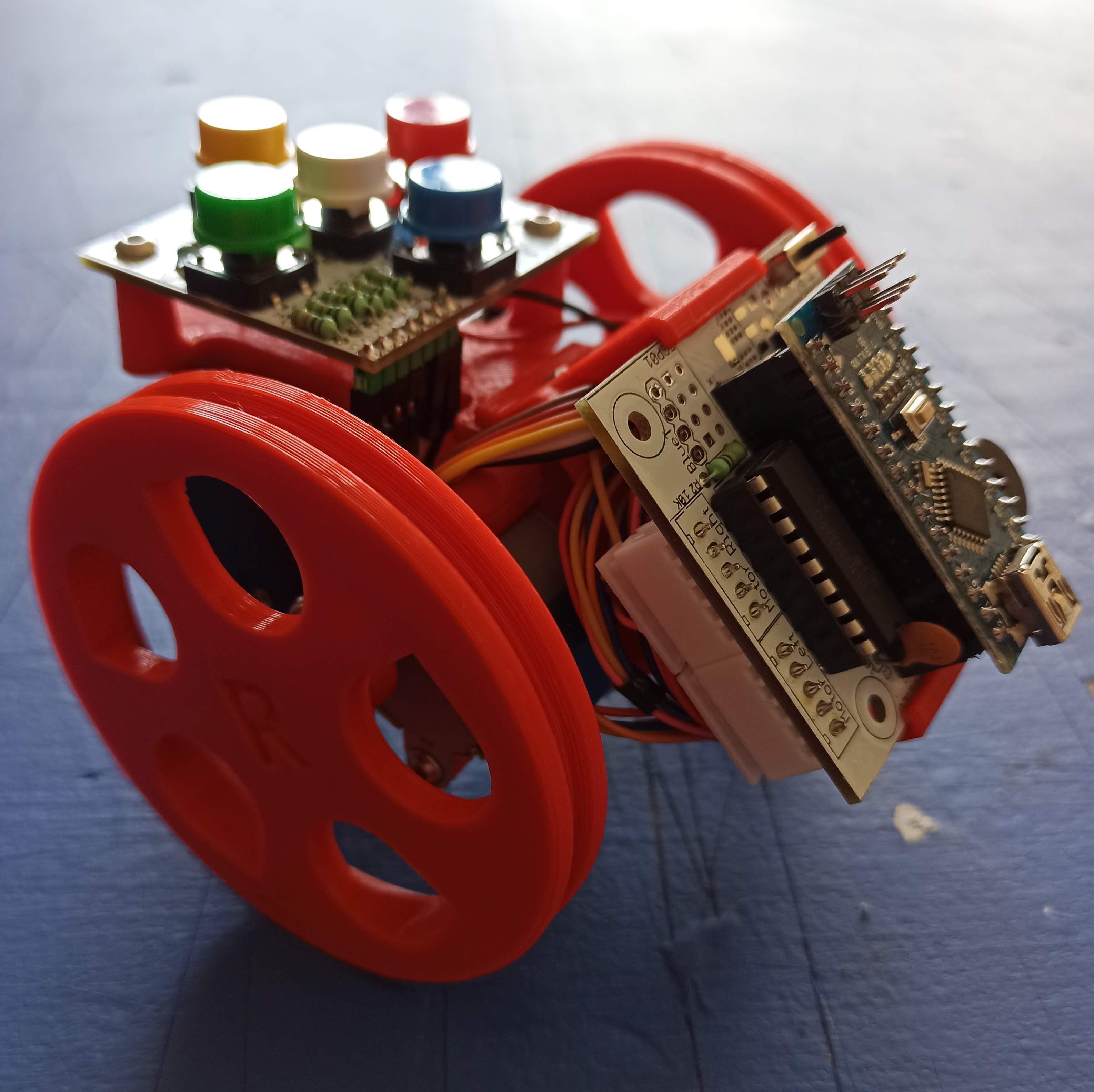
Robot Educativo Escornabot
Este robot en su versión Brivoi Compactus está basado en el proyecto: Escornabot desarrollado en España por una amplia comunidad de ingenieros, makers y profesores para enseñar robótica y programación...
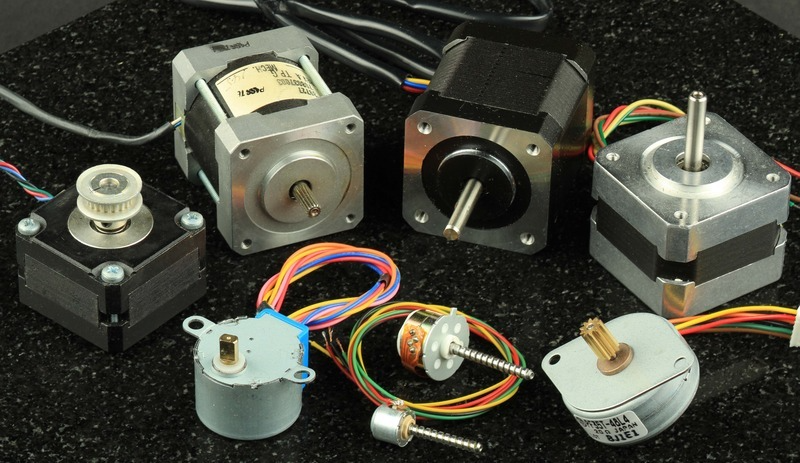
Motores Paso a Paso
Descripción Los motores paso a paso son motores DC que giran en pasos discretos. Se caracterizan por tener varias bobinas organizadas en grupos denominados fases. Al energizar de forma controlada...
Tag Capes
OpenCV en la BeagleBone Black/Green Wireless
Lo primero que tengo que decir es que opencv es una de las más completas librerías para el procesamiento digital de imágenes. Yo la usé en mi tesis doctoral por...
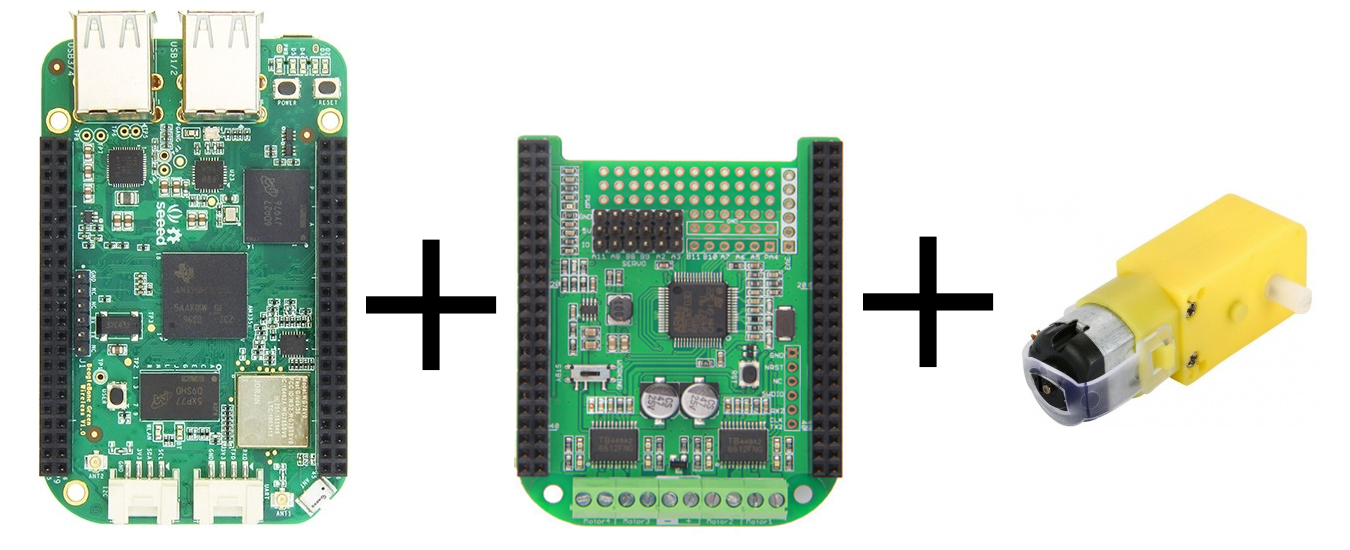
Configurar el Motor Cape de Seeed Studio en Python
En este post muestro cómo configurar el Motor Cape de Seeed Studio para realizar el control de motores de corriente continua (motores DC), servomotores y motores paso a paso con...
Tag DCMotors
Drive any DC Motors with the L298N driver and the BeagleBone Black
In this post, I show how to control any number of DC Motors to move forward or backward using the BeagleBone and the driver L298N. In practice, this driver can...
Drive 2 DC motors with the L298N driver and the BeagleBone Black
In this post, I show how to control a pair of DC Motors to move forward, backward, and turn left or right. I am using the BeagleBone and the driver...
Using threads to drive a DC motor with the L298N driver in the BeagleBone Black
Pink spool icon made by iconixar from www.flaticon.com
Control a DC motor from the keyboard with the L298N driver and the BeagleBone Black
In this post, I show how to drive a DC Motor from the keyboard using the driver L298N which can drive two DC motors. In practice, this driver can be...
Drive a DC motor with the L298N driver and the BeagleBone Black
In this post, I show how to drive a DC Motor with the driver L298N which can drive two DC motors. In practice, this driver can be found in a...
Drive any DC Motors with the TB6612FNG driver and the BeagleBone Black
In this post, I show how to control any DC Motors forward and backward. I am using the BeagleBone and the TB6612FNG driver from Toshiba. In the last entry, you...
Drive 2 DC motors with the TB6612FNG driver and the BeagleBone Black
In this post, I show how to control a pair of DC Motors forward and backward. I am using the BeagleBone and the TB6612FNG driver from Toshiba. The remarkable aspect...
Using threads to drive a DC motor with the TB6612FNG driver in the BeagleBone Black
Pink spool icon made by iconixar from www.flaticon.com
Control a DC motor from the keyboard with the TB6612FNG driver and the BeagleBone Black
In this post, I show how to drive a DC Motor from the keyboard using the BeagleBone and the TB6612FNG driver from Toshiba. In the last entry, you can read...
Drive a DC motor with the TB6612FNG driver and the BeagleBone Black
In this post, I show how to drive a DC Motor with the TB6612FNG driver from Toshiba.
OpenCV en la BeagleBone Black/Green Wireless
Lo primero que tengo que decir es que opencv es una de las más completas librerías para el procesamiento digital de imágenes. Yo la usé en mi tesis doctoral por...
Configurar el Motor Cape de Seeed Studio en Python
En este post muestro cómo configurar el Motor Cape de Seeed Studio para realizar el control de motores de corriente continua (motores DC), servomotores y motores paso a paso con...
Tag wifi
Conectar a internet la BeagleBone Black/Green Wireless
En este post que va a ser muy cortito, muestro cómo conectar la BeagleBone black y la Beagle Bone Green Wireless a internet a través de Wifi.
Tag Design
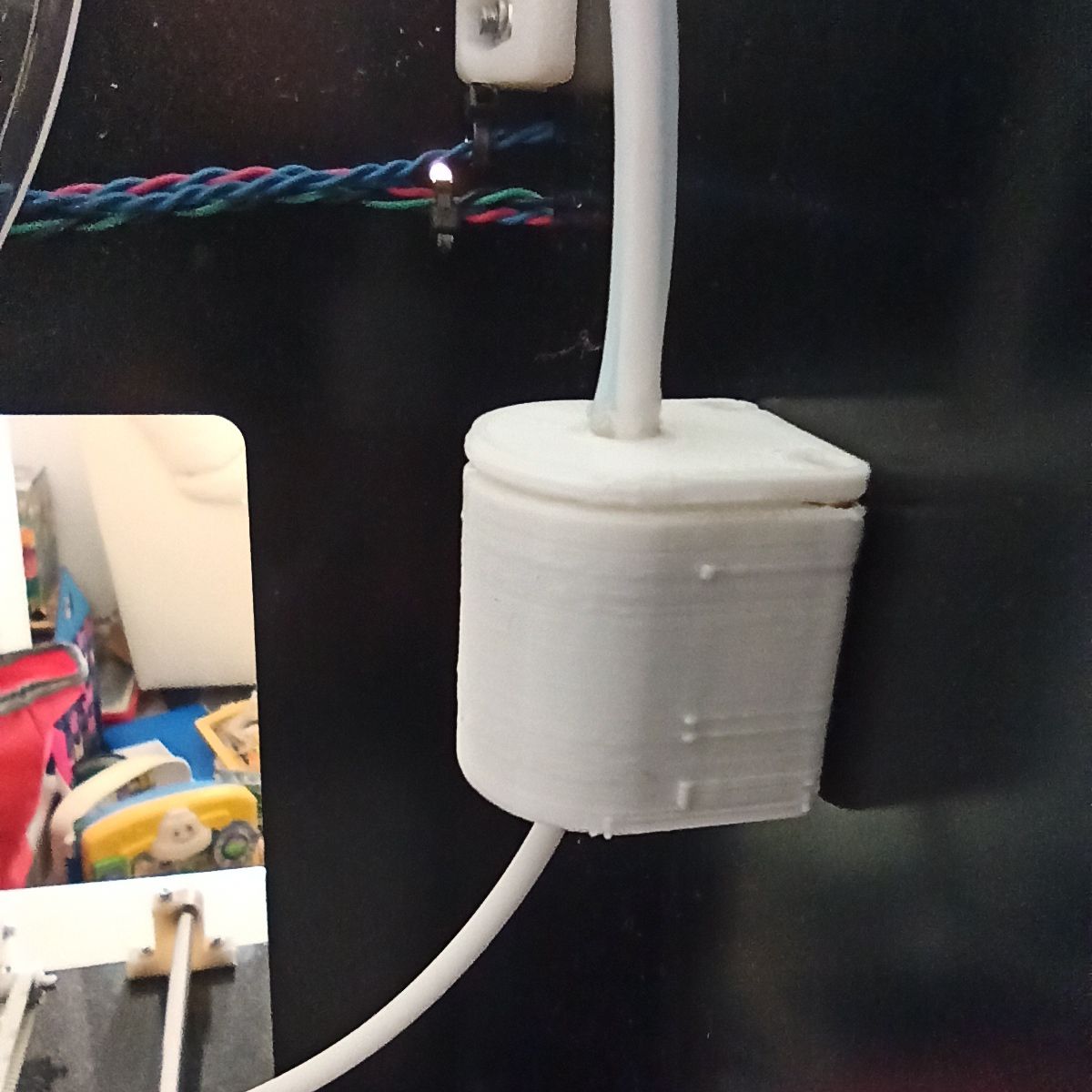
3D Printed Filament Dust Filter
This post shows another filament dust filter make of 2 parts, a cover and a base parts. Both are shown in the Figure 2a and 2b, respectively.
Tag GPIO
Blinking a LED without Delay in the BeagleBone Black
In this post, I show how to blink a LED with using Delays routines. This is done through the implementation of some functions that retrieve the time and duration of...
Turning ON / OFF six LEDs in order with the BeagleBone Black
In this post, I show how to blink in order six LEDs in the BeagleBone Black using Delays routines. This is done with the DelayMilliseconds function which uses the C++...
Updates to the C++ library for the BeagleBone Black
In this post, I show some updates to the library explained previously in: GPIO Class LED Class Button Class PWM Class ADC Class
Reading a button with the BeagleBone Black
In this post, I will show you how to read the input from a button and turn a led On each time it will be pressed. I will be using...
Turning a Led On / Off with the BeagleBone Black
In this post I will show you how to turn a led On and Off using the C++ library described in the post Beaglebone and C++ to access and control...
GPIO C++ Class
This post will be the starting point about how to program the BeagleBone in C++. Here, I show the code of a library to access and control the general purpose...
Tag LED
Updates to the C++ library for the BeagleBone Black
In this post, I show some updates to the library explained previously in: GPIO Class LED Class Button Class PWM Class ADC Class
Flashing a pair of LEDs with the BeagleBone Black
In this post, I will show you how to make a flashing on a pair of LEDs, i.e., turn on and off a Led but with a different duration between...
Blinking a pair of LEDs with the BeagleBone Black
In this post, I will show you how to make a blinking on a pair of LEDs. I will be using the LED C++ Class described in the post Implementation...
Implementation of the LED Class for BeagleBone Black
In this post, I show a LED C++ class implementation which is derived from GPIO class and adds some methods for blink a led.
Tag BUTTONS
Read and store the sequence of the keypad pressed buttons in the BeagleBone Black
In this post, I show how to read and store the keypad pressed buttons sequence in a vector. In the last post, I showed how to read the signal from...
Read the signal from a 5 buttons keypad in the BeagleBone Black
In this post, I show how to read the signal from an analog keypad with 5 buttons. The keypad used is the E_KEYPAD_2_2 that was designed by Xabier Rosas and...
Blinking, flashing and doing a heartbeat patterns with LEDs and buttons in the BeagleBone Black
In this post, I will resume the applications of LEDs and Buttons using the methods described in the last posts. In this case, one LED will be blinking, the other...
Reading a button in the BeagleBone Black PART III
In this post, I will continue to show you how to read a button with the BeagleBone Black. In the second entry I showed how to wait for the press...
Reading a button in the BeagleBone Black PART II
In this post, I will continue to show you how to read a button with the BeagleBone Black. In the first entry I showed how to read an input from...
Reading a button in the BeagleBone Black PART I
In this post, I will show you how to read a button with the BeagleBone Black. I have written a previous post that shows the same behavior. The difference with...
Implementation of the BUTTON Class for BeagleBone Black
In this post, I show a Button C++ class implementation in order to read an attached button to a GPIO pin in the BeagleBone Black. The public methods written in...
Tag PWM
Control the Brightness of a LED with a Potentiometer in the BeagleBone Black
In this post, I show how to control the brightness of a LED with a potentiometer. The LED is wired to a PWM pin and the Potentiometer to an ADC...
Updates to the C++ library for the BeagleBone Black
In this post, I use the six PWM pins available on the BeagleBone and show how to work with them in order to control the brightness of six LEDs. Remembering...
Updates to the C++ library for the BeagleBone Black
In this post, I show some updates to the library explained previously in: GPIO Class LED Class Button Class PWM Class ADC Class
Doing a pulse light effect on a LED with PWM in the BeagleBone Black
In this post, I start applying the PWM technique to do a light pulse effect on a LED. This is inspired by the work by Sparkfun titled Pulse a LED,...
Control the brightness of a LED with PWM in the BeagleBone Black
In this post, I start with the PWM technique applied to control the brightness of a LED. Remembering the PWM is a technique that lets us emulate an analog signal...
Implementation of the PWM Class for BeagleBone Black
In this post, I show a PWM C++ class implementation. Remembering the PWM is a technique that lets us emulate an analog signal in a digital pin. This is done...
Tag ADC
Read and store the sequence of the keypad pressed buttons in the BeagleBone Black
In this post, I show how to read and store the keypad pressed buttons sequence in a vector. In the last post, I showed how to read the signal from...
Read the signal from a 5 buttons keypad in the BeagleBone Black
In this post, I show how to read the signal from an analog keypad with 5 buttons. The keypad used is the E_KEYPAD_2_2 that was designed by Xabier Rosas and...
Using the LM35 temperature sensor in the BeagleBone Black
In this post, I show how to read the temperature from the analog sensor LM35. The datasheet can be found here. This sensor has an output voltage linearly-proportional to the...
Control the speed of a 360° servomotor from a potentiometer in the BeagleBone Black
In this post, I show how to control the speed of the 360° continuous rotation servomotor SM-S4303R which can run to 60rpm if the servomotor is powered with 4.8V or...
Control a servomotor SG90 from a potentiometer in the BeagleBone Black
In this post, I show how to control the position of a Servomotor SG90 with a potentiometer using the BeagleBone and the library that I have been written in C++...
Control the Brightness of a LED with a Potentiometer in the BeagleBone Black
In this post, I show how to control the brightness of a LED with a potentiometer. The LED is wired to a PWM pin and the Potentiometer to an ADC...
Updates to the C++ library for the BeagleBone Black
In this post, I show some updates to the library explained previously in: GPIO Class LED Class Button Class PWM Class ADC Class
Reading an analog voltage with continuous sampling in the BeagleBone Black
In this post, I show a simple application to read an analog voltage running in the background with its own thread with the ADC C++ class implementation shown previously in...
Reading an analog value with continuous sampling in the BeagleBone Black
In this post, I show a simple application to read an analog value running in the background with its own thread with the ADC C++ class implementation shown previously in...
Reading an analog voltage from a potentiometer in the BeagleBone Black
In this post, I show a simple application to read and analog voltage with the ADC C++ class implementation shown previously in this post. Remembering that the BeagleBone has 7...
Reading an analog value from a potentiometer in the BeagleBone Black
In this post, I show a simple application of the analog to digital converter (ADC) C++ class implementation shown previously in this post. Remembering that the BeagleBone has 7 analog...
Implementation of the ADC Class for BeagleBone Black
In this post, I show an analog to digital converter (ADC) C++ class implementation. Remembering that the BeagleBone has 7 analog inputs and ADC of 12 bits that lets to...
Tag HC_SR04
Including temperature and offset corrections for the ultrasonic sensor HC_SR04 in the BeagleBone Black
In this post, I show how to include the air temperature in the calculus of the speed sound and include an offset value for the distance reported by the sensor....
Integrating a median filter for the ultrasonic sensor HC_SR04 in the BeagleBone Black
In this post, I show how to use a median filter for measuring the distance with the cheap ultrasonic sensor HC_SR04. This class is part of a whole library that...
Measuring distance with the ultrasonic sensor HC_SR04 in the BeagleBone Black
In this post, I show how to measure distance with the cheap ultrasonic sensor HC_SR04. The main contribution is to provide a class in C++ with implemented methods to get...
Tag Sensors
Using the LM35 temperature sensor in the BeagleBone Black
In this post, I show how to read the temperature from the analog sensor LM35. The datasheet can be found here. This sensor has an output voltage linearly-proportional to the...
Including temperature and offset corrections for the ultrasonic sensor HC_SR04 in the BeagleBone Black
In this post, I show how to include the air temperature in the calculus of the speed sound and include an offset value for the distance reported by the sensor....
Integrating a median filter for the ultrasonic sensor HC_SR04 in the BeagleBone Black
In this post, I show how to use a median filter for measuring the distance with the cheap ultrasonic sensor HC_SR04. This class is part of a whole library that...
Measuring distance with the ultrasonic sensor HC_SR04 in the BeagleBone Black
In this post, I show how to measure distance with the cheap ultrasonic sensor HC_SR04. The main contribution is to provide a class in C++ with implemented methods to get...
Tag TB6612FNG
Drive any DC Motors with the TB6612FNG driver and the BeagleBone Black
In this post, I show how to control any DC Motors forward and backward. I am using the BeagleBone and the TB6612FNG driver from Toshiba. In the last entry, you...
Drive 2 DC motors with the TB6612FNG driver and the BeagleBone Black
In this post, I show how to control a pair of DC Motors forward and backward. I am using the BeagleBone and the TB6612FNG driver from Toshiba. The remarkable aspect...
Using threads to drive a DC motor with the TB6612FNG driver in the BeagleBone Black
Pink spool icon made by iconixar from www.flaticon.com
Control a DC motor from the keyboard with the TB6612FNG driver and the BeagleBone Black
In this post, I show how to drive a DC Motor from the keyboard using the BeagleBone and the TB6612FNG driver from Toshiba. In the last entry, you can read...
Drive a DC motor with the TB6612FNG driver and the BeagleBone Black
In this post, I show how to drive a DC Motor with the TB6612FNG driver from Toshiba.
Tag Servomotors
Control the speed of a 360° servomotor from a potentiometer in the BeagleBone Black
In this post, I show how to control the speed of the 360° continuous rotation servomotor SM-S4303R which can run to 60rpm if the servomotor is powered with 4.8V or...
Control a servomotor SG90 from a potentiometer in the BeagleBone Black
In this post, I show how to control the position of a Servomotor SG90 with a potentiometer using the BeagleBone and the library that I have been written in C++...
Control a servomotor SG90 from the keyboard in the BeagleBone Black
In this post, I show how to control the position of a Servomotor SG90 from the keyboard using the BeagleBone and the library that I have been written in C++...
Sweep on a Servomotor SG90 in the BeagleBone Black
In this post, I show how to control the position of a Servomotor SG90 using the BeagleBone and the library that I have been written in C++ which you can...
Tag L298N
Drive any DC Motors with the L298N driver and the BeagleBone Black
In this post, I show how to control any number of DC Motors to move forward or backward using the BeagleBone and the driver L298N. In practice, this driver can...
Drive 2 DC motors with the L298N driver and the BeagleBone Black
In this post, I show how to control a pair of DC Motors to move forward, backward, and turn left or right. I am using the BeagleBone and the driver...
Using threads to drive a DC motor with the L298N driver in the BeagleBone Black
Pink spool icon made by iconixar from www.flaticon.com
Control a DC motor from the keyboard with the L298N driver and the BeagleBone Black
In this post, I show how to drive a DC Motor from the keyboard using the driver L298N which can drive two DC motors. In practice, this driver can be...
Tag Arduino
A script to start connman wifi service at boot using a Systemd service
In this post, I show a script to enable the wifi service automatically at boot in the BeagleBone using connman.
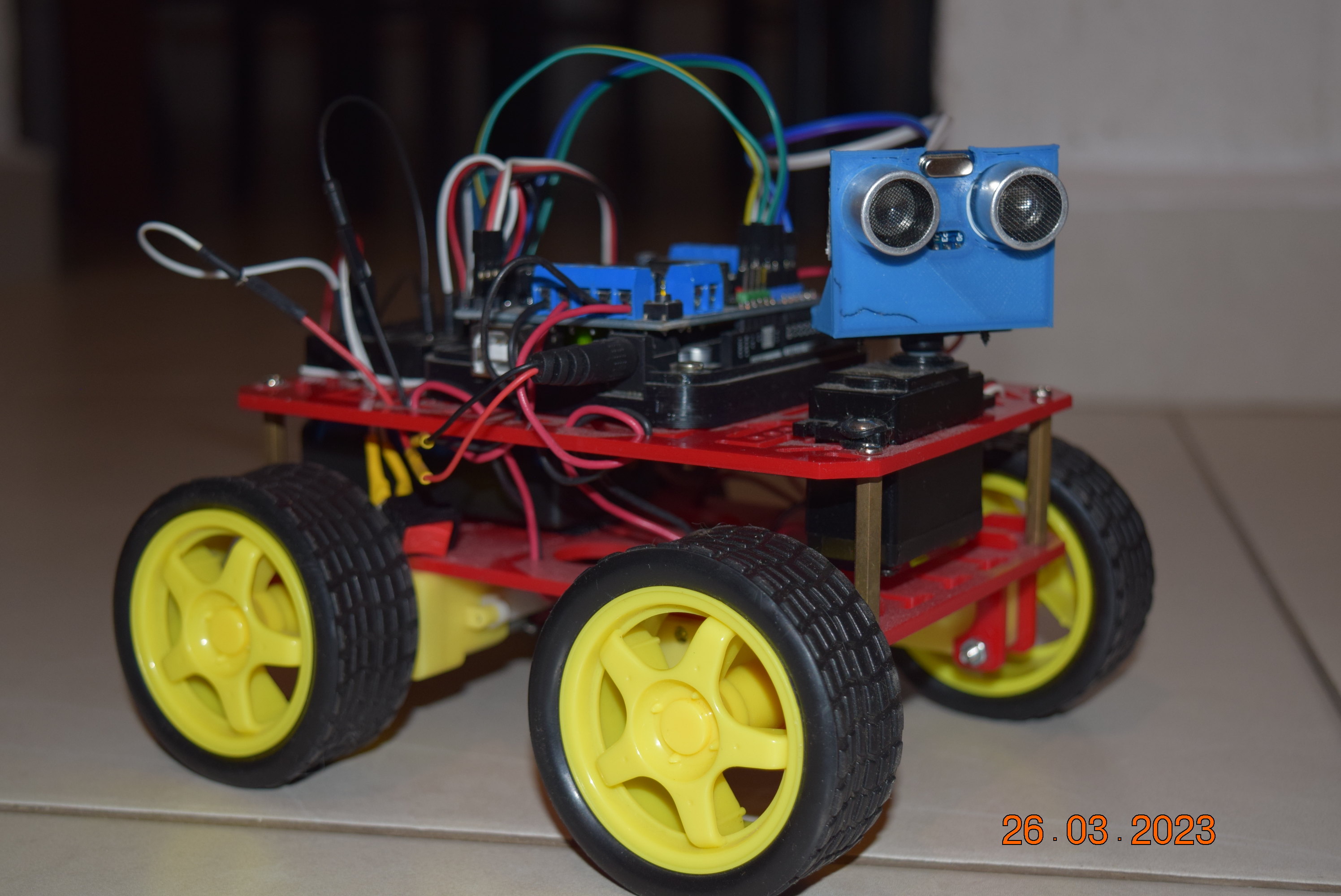
A 4WD Bluetooth Robot Based on Arduino
In this post, I show off a Bluetooth four-wheeled mobile robot with Arduino Uno. It uses the classic “yellow” DC gear motors but It has an HC-SR04 Ultrasonic Sensor to...
Tag Games