In this post, I show how to control any DC Motors forward and backward. I am using the BeagleBone and the TB6612FNG driver from Toshiba. In the last entry, you can read about how to drive a pair of DC motors with this driver.
The remarkable aspect is the use of C++ vectors to drive simultaneously the number of DC motors the user wants in the same rotation direction. You have to take into account that the TB6612FNG driver only can manage 2 DC motors. If you need more, you have to add more drivers. In this post, I show how to use the STL container std::vector to drive 2 DC motors.
It is important to remember that the logic voltage for the BeagleBone is 3.3V. If the user provides a greater voltage, the BeagleBone could be damaged.
Circuit and components
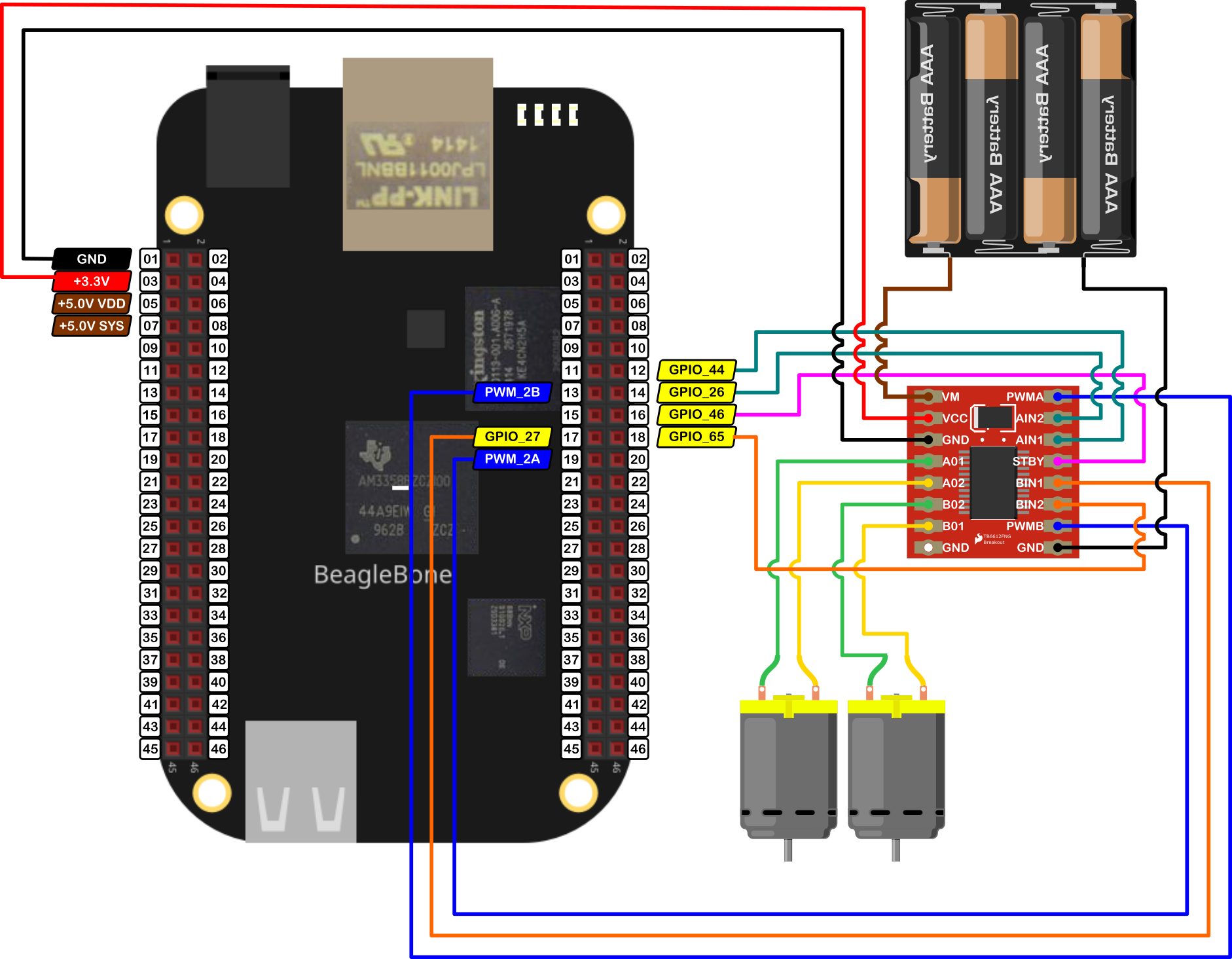
The circuit can be seen in Figure 1. It consists of a TB6612FNG driver, 2 low voltage DC Motors, 4 AA batteries, and the BeagleBone Black.
The components are:
- 1 DC Motor driver TB6612FNG
- 2 DC Motor 3.0 - 6.0V
- 4 AA Batteries
- 1 Protoboard mini
- Jumpers male-male to make the connections
The pins used for control the driver and the motors are:
- GPIO P8_16 to activate / deactivate de driver
- The pins used for control the motor A are:
- GPIO P8_12 and P8_14 to control the motor rotation direction
- PWM P8_13 to control the speed
- The pins used for control the motor B are:
- GPIO P8_17 and P8_18 to control the motor rotation direction
- PWM P8_19 to control the speed
Coding
GPIO and TB6612FNG objects are declared with global scope to initialize the digital pin to activate/deactivate the driver and the pins that will control the motors.
These GPIO objects are used as the parameters to construct the TB6612FNG objects. Remember that the user can include a boolean initialization parameter true/false to invert by software the motor rotation direction instead of inverting the motor’s jumpers physically.
As is shown next, I have used this parameter to invert the rotation direction of the Motor B setting the last parameter to true, instead of inverting the jumpers physically. This feature can be useful when you do not have access to the circuit or the motor directly.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
// Declare the pin to activate / deactivate the TB6612FNG module
GPIO standByPin(P8_16);
// Declaring the pins for motor 1
GPIO AIN1 (P8_12);
GPIO AIN2 (P8_14);
PWM PWMA (P8_13);
// Declaring the pins for motor 2
GPIO BIN1 (P8_17);
GPIO BIN2 (P8_18);
PWM PWMB (P8_19);
// Declare the object for motor 1
TB6612FNG MotorA (AIN1, AIN2, PWMA, false);
// Declare the object for motor 2
TB6612FNG MotorB (BIN1, BIN2, PWMB, true);
After that, I declare a vector of pointers to the TB6612FNG objects and initializes that with the MotorA and MotorB declared previously but passing these by reference instead of by value. This avoids creating a copy for each object and working directly with the motors. Is here, where the user can add the number of motors desired. This can be done in the same way with the pair of motors shown here.
1
2
// Declare the vector of pointers to TB6612FNG objects
vector<TB6612FNG *> vectorOfMotors = {&MotorA, &MotorB};
In the main section, the next line shows how to activate the TB6612FNG driver. Remember, if you are using more than one Tb6612FNG driver, you have to declare a GPIO pin by each module and activate it using the next line:
1
2
// Activate the module
ActivateTB6612FNG(standByPin);
To control the speed of both motors, the user can change it using the keys “W” and “S” to increase or decrease it, respectively. The class method Drive() checks if the user has input a value for the speed beyond the limits of 100 and -100 and keeps it between this range, but in this case, the user code can do that too. If the user presses the key “Y”, the program finishes.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
// Update the motors speed
switch (userInput)
{
case 'w':
motorSpeed += 10;
if (motorSpeed >= 100)
motorSpeed = 100;
break;
case 's':
motorSpeed -= 10;
if (motorSpeed <= -100)
motorSpeed = -100;
break;
default:
break;
}
To move the motors, the code uses the functions Forward() and Backward() defined in the same TB6612FNG class. These functions are not members of any TB6612FNG object, on the contrary, they are independent and can be called directly from the main implementation code.
The Forward() and Backward() functions take as arguments a vector of pointers to TB6612FNG objects passed by reference and the speed value that will be used to drive the motors. Inside of these functions, a for loop iterates on each TB6612FNG object, i.e., on each motor, and drive it in the same rotation direction at the desired speed.
1
2
3
4
5
6
7
8
9
10
11
12
13
/*
Overload function to drive FORWARD a robot with ANY number of motors
@param std::vector<TB6612FNG *>: The vector of pointers to TB6612FNG objects
@param int: The desired speed (0,100). It set up the correct value if
the user enters a negative value.
*/
void Forward (std::vector<TB6612FNG *> vectorOfMotors, int speed)
{
if (speed < 0)
speed *= -1;
for (auto motor : vectorOfMotors)
motor->Drive(speed);
}
1
2
3
4
5
6
7
8
9
10
11
12
13
/*
Overload function to drive BACKWARD a robot with ANY number of motors
@param std::vector<TB6612FNG *>: The vector of pointers to TB6612FNG objects
@param int: The desired speed (-100,0). It set up the correct value if
the user enters a positive value.
*/
void Backward (std::vector<TB6612FNG *> vectorOfMotors, int speed)
{
if (speed > 0)
speed *= -1;
for (auto motor : vectorOfMotors)
motor->Drive(speed);
}
In order to complement the behavior of the class, the Brake() function is defined too. It brakes any number of motors in the vector of pointers to TB6612FNG objects.
1
2
3
4
5
6
7
8
9
/*
Overload function BRAKE a robot with ANY number of motors
@param std::vector<TB6612FNG *>: The pointer vector of motors
*/
void Brake (std::vector<TB6612FNG *> vectorOfMotors)
{
for (auto motor : vectorOfMotors)
motor->Brake();
}
In the implementation code, the user can decide when calls one, other, or one-third option to brake the motors with the Brake() function.
1
2
3
4
5
6
7
// Move the motors
if (motorSpeed > 0)
Forward(vectorOfMotors, motorSpeed);
else if (motorSpeed < 0)
Backward(vectorOfMotors, motorSpeed);
else
Brake(vectorOfMotors);
Finally, the TB6612FNG has to be deactivated using the next line.
1
2
// Deactivate the module
DeactivateTB6612FNG(standByPin);
The complete code for this application using a while loop to control the motors increasing and decreasing the speed until the user press the key “Y”. This code is shown in the next listing together with its corresponding execution output.
TB6612FNG_1.5.cpp
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
/******************************************************************************
TB6612FNG_1.5.cpp
@wgaonar
09/07/2021
https://github.com/wgaonar/BeagleCPP
- Drive a 2 or more motors through a vector
Class: TB6612FNG
******************************************************************************/
#include <iostream>
#include "../../../Sources/TB6612FNG.h"
using namespace std;
// Declare the pin to activate / deactivate the TB6612FNG module
GPIO standByPin(P8_16);
// Declaring the pins for motor 1
GPIO AIN1 (P8_12);
GPIO AIN2 (P8_14);
PWM PWMA (P8_13);
// Declaring the pins for motor 2
GPIO BIN1 (P8_17);
GPIO BIN2 (P8_18);
PWM PWMB (P8_19);
// Declare the object for motor 1
TB6612FNG MotorA (AIN1, AIN2, PWMA, false);
// Declare the object for motor 2
TB6612FNG MotorB (BIN1, BIN2, PWMB, true);
// Declare the vector of pointers to TB6612FNG objects
vector<TB6612FNG *> vectorOfMotors = {&MotorA, &MotorB};
int main()
{
string message = "Main program starting here...";
cout << RainbowText(message,"Blue", "White", "Bold") << endl;
// Activate the module
ActivateTB6612FNG(standByPin);
message = "If you want to stop the program, enter 'y' for yes";
cout << RainbowText(message, "Blue") << endl;
message = "Or enter 'w' for increase speed or 's' for decrease it";
cout << RainbowText(message, "Blue") << endl;
int motorSpeed = 0;
char userInput = '\0';
while (userInput != 'y')
{
message = "Enter an option 'y', 'w', 's': ";
cout << RainbowText(message, "Blue");
cin >> userInput;
// Update the motor's speed
switch (userInput)
{
case 'w':
motorSpeed += 10;
if (motorSpeed >= 100)
motorSpeed = 100;
break;
case 's':
motorSpeed -= 10;
if (motorSpeed <= -100)
motorSpeed = -100;
break;
default:
break;
}
// Move the motors
if (motorSpeed > 0)
Forward(vectorOfMotors, motorSpeed);
else if (motorSpeed < 0)
Backward(vectorOfMotors, motorSpeed);
else
Brake(vectorOfMotors);
}
// Deactivate the module
DeactivateTB6612FNG(standByPin);
message = "Main program finishes here...";
cout << RainbowText(message,"Blue", "White","Bold") << endl;
return 0;
}
Execution of the program:
Se you in the next post.