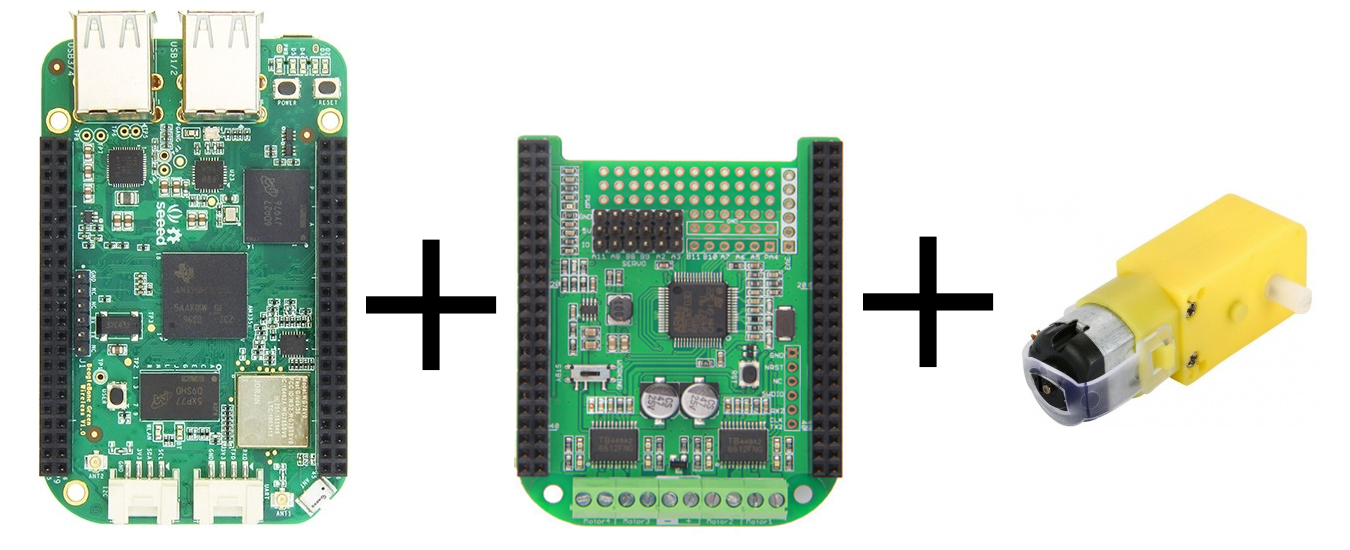
En este post muestro cómo configurar el Motor Cape de Seeed Studio para realizar el control de motores de corriente continua (motores DC), servomotores y motores paso a paso con nuestra BeagleBone. Específicamente, se pueden manejar hasta 4 motores DC y 6 servomotores simultáneamente ó hasta 2 motores paso a paso y 6 servomotores, ó una combinación de 1 motor paso a paso, 2 motores Dc y 6 servomotores en una forma simultánea.
En este caso trabajo con la BeagleBone Green Wireless (BBGW). Sin embargo, la Motor Cape es compatible con el ecosistema de boards de la familia Beagleboard.org
El objetivo es poder controlar un motor DC de forma precisa y elegante con esta bellísima Motor Cape.
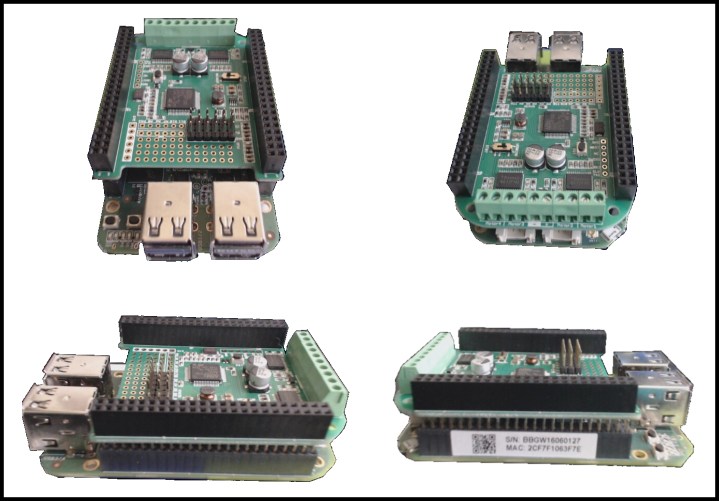
Conectar la Motor Cape a la BBGW
Antes que nada, tenemos que conectar la MotorCape a la BBGW. Para ello hay que insertar los pines de la Motor Cape en los conectores de la BBGW cuidando la orientación y que cada uno de los pines quede correctamente insertado. A manera de guía, en las siguientes imágenes se pueden observar diferentes vistas de cómo debe quedar conectada.
Instalación del Driver de la Motor Cape
El primer paso, como es costumbre, consiste en actualizar el software en nuestra BBGW
1
sudo apt-get update && apt-get upgrade
El segundo paso consiste en instalar algunos pre-requisitos para Python, sí es que no lo hemos hecho anteriormente.
1
2
sudo apt-get install build-essential python python-all-dev
sudo apt-get install python-pip python-numpy python-smbus
Si no tenemos instalada la librería Adafruit_GPIO para Python, procederemos a instalarla desde las fuentes. Creamos una carpeta denominada: updates, sí es que no la hemos creado ya!. Esta carpete será el lugar donde se guarde todo el software de terceros que en un futuro descarguemos:
1
2
3
4
5
mkdir updates && cd updates
git clone https://github.com/adafruit/Adafruit_Python_GPIO.git
cd Adafruit_Python_GPIO
sudo python setup.py install
cd ..
Instalar el Firmware del motor cape el cual se encuentra en el repositorio: GitHub-MotorBridgeCapeFirmware
1
2
3
4
git clone https://github.com/Seeed-Studio/MotorBridgeCapeFirmware
cd MotorBridgeCapeFirmware/
make flash
cd ..
En caso de que se llegue a presentar el error de comunicación del tipo: serial.serialutil.SerialException como el que se muestra en la siguiente imagen, es necesario habilitar el puerto serial 2 de la BBGW mediante la edición del archivo:
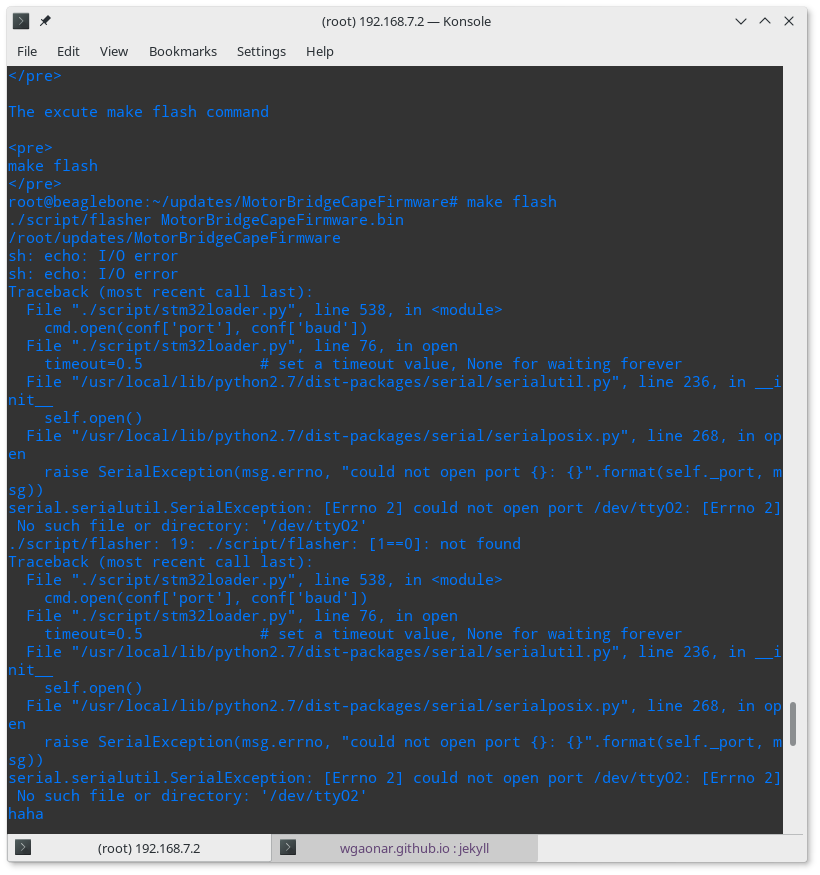
Para solucionar esto basta con adicionar la línea de código: cape_enable=bone_capemgr.enable_partno=BB-UART2 al archivo /boot/uEnv.txt.
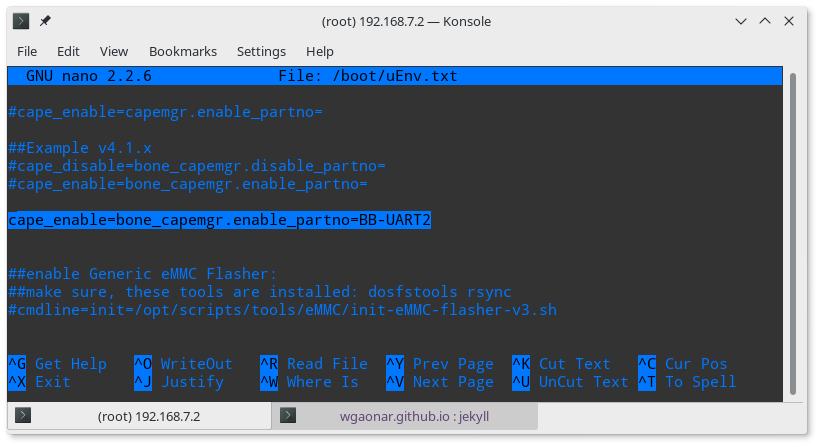
Para ello podemos hacer uso del editor de texto nano, el cual corre en la terminal, para adicionar la línea anteriormente mencionada. Para abrir nano, basta con la ejecución de la siguiente instrucción:
1
sudo nano /boot/uEnv.txt
Una vez que hayamos adicionado la línea, el aspecto final del archivo /boot/uEnv.txt debe ser el siguiente:
Posteriormente, es necesario reiniciar nuestra BBGW y realizar nuevamente el proceso de instalación del driver
1
2
3
4
5
sudo reboot
cd updates/MotorBridgeCapeFirmware/
make flash
cd ..
Sí no se presentó el error de comunicación ó una vez editado el archivo /boot/uEnv.txt y reiniciada la BBGW; la salida en la terminal al teclear el comando: make flash debe ser el mensaje: Verification OK
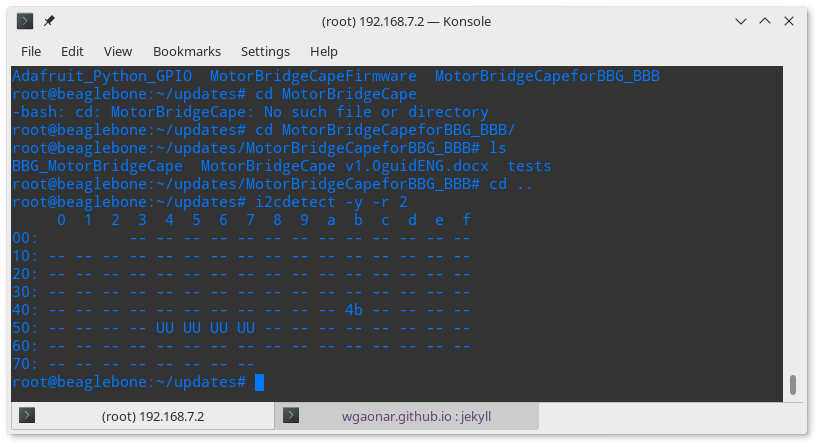
Para verificar que nos podemos comunicar con la Motor Cape, basta con ejecutar el siguiente comando, el cual nos dará como salida la dirección Hexadecimal que atiene asignada la Motor Cape, la cual por defecto es: 4b
1
i2cdetect -y -r 2
En caso de que se presente un error diferente, podemos consular el forum sobre el Motor Cape de Seeed-Studio
Prueba del Motor Cape
Una vez instalado el driver del Motor Cape, el siguiente paso es instalar las librerías para el control de motores. Para ello Seeed -Studio nos ofrece el siguiente repositorio en GitHub-MotorBridgeCapeforBBG_BBB el cual debemos clonar a través del siguiente comando:
1
git clone https://github.com/Seeed-Studio/MotorBridgeCapeforBBG_BBB
Una vez clonado el repositorio vamos a utilizar la librería para activar un motor DC. Para ello, tecleamos los siguientes comandos en la terminal:
1
2
3
4
cd MotorBridgeCapeforBBG_BBB
cp BBG_MotorBridgeCape/MotorBridge.py tests/
cd tests
python DCMotorTest.py
Se puede dar el caso de que se presente el siguiente error:
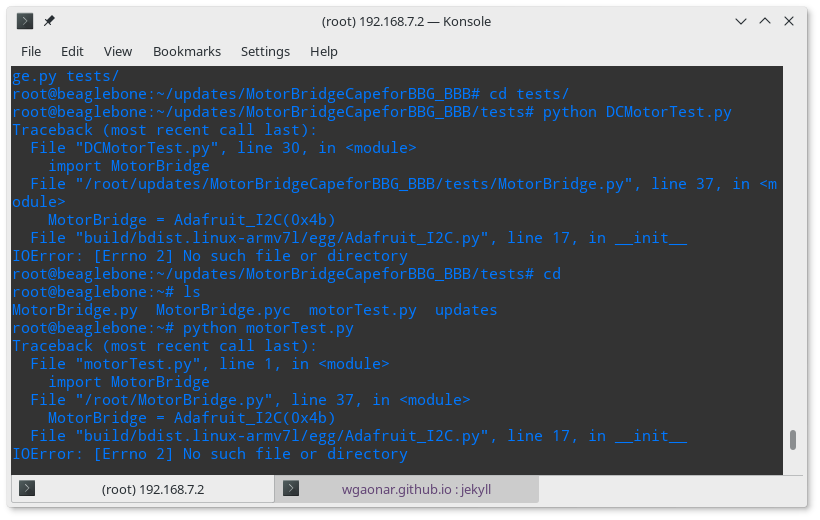
Este error es debido a que falta especificar en el archivo: MotorBridge.py el número de puerto serie al que accedemos para comunicarnos con la Motor Cape, que en este caso corresponde al 2. Por lo tanto, para solucionarlo basta con modificar en este archivo la línea de código MotorBridge = Adafruit_I2C(0x4b) a:
1
MotorBridge = Adafruit_I2C(0x4b,2)
En seguida procedemos a probar nuevamente el programa de prueba de motores DC y debemos observar los leds de color rojo y azul del motor 3 pulsado alternadamente. Esto significa que el driver de nuestra Motor Cape ha sido instalado correctamente y que está lista para ser usada.