
En este post muestro el circuito, el diagrama de flujo, el código y la implementación de un programa en lenguaje ensamblador en el microcontrolador PIC 16F886 para realizar una temporización que permita cambiar el estado de un LED cada segundo haciendo uso de rutinas de demora tipo delay
EL propósito es aplicar las instrucciones de no operation: NOP y de decremento-prueba de un registro: DECFSZ para realizar las temporizaciones.
La implementación consta de 1 salida por el pin de RB0 conectada a un led para realizar un ciclo de temporización de 1 segundo. La configuración es la siguiente:
- RB0: 1 segundo ON - 1 segundo OFF
Hay que tener en cuenta que la realización las temporizaciones de esta forma es secuencial y restringe el PIC a no poder realizar otra tarea mientras se esta ejecutando el programa.
Configuración de entradas y salidas
La siguiente tabla muestra a detalle los bits utilizados por el programa:
| Bit | Función | Descripción |
|---|---|---|
| RB0 | Salida | Temporización del led |
Diagrama eléctrico
El diagrama del circuito respectivo es el que se muestra a continuación:
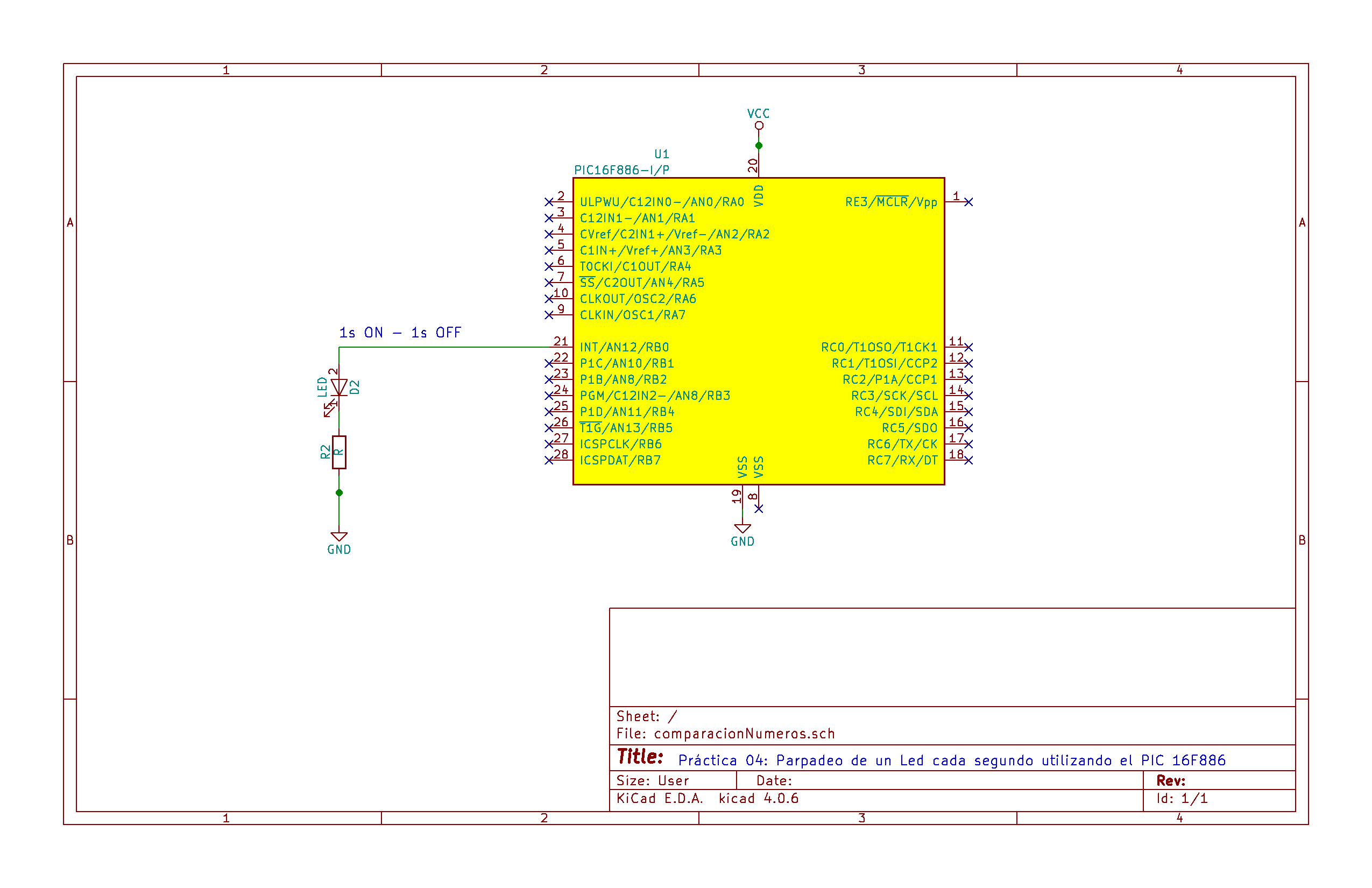
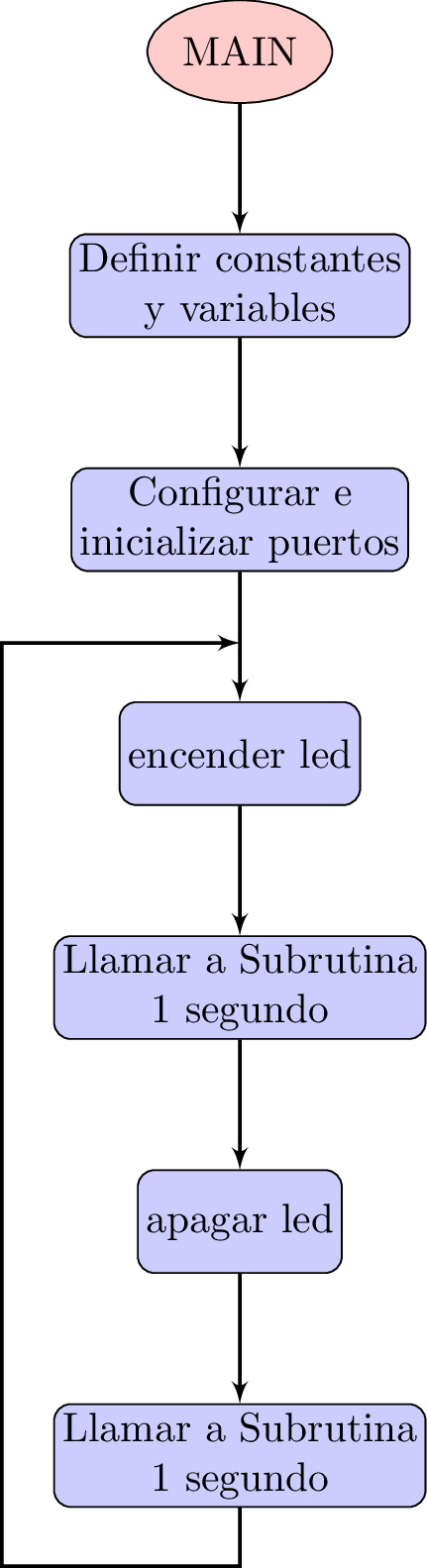
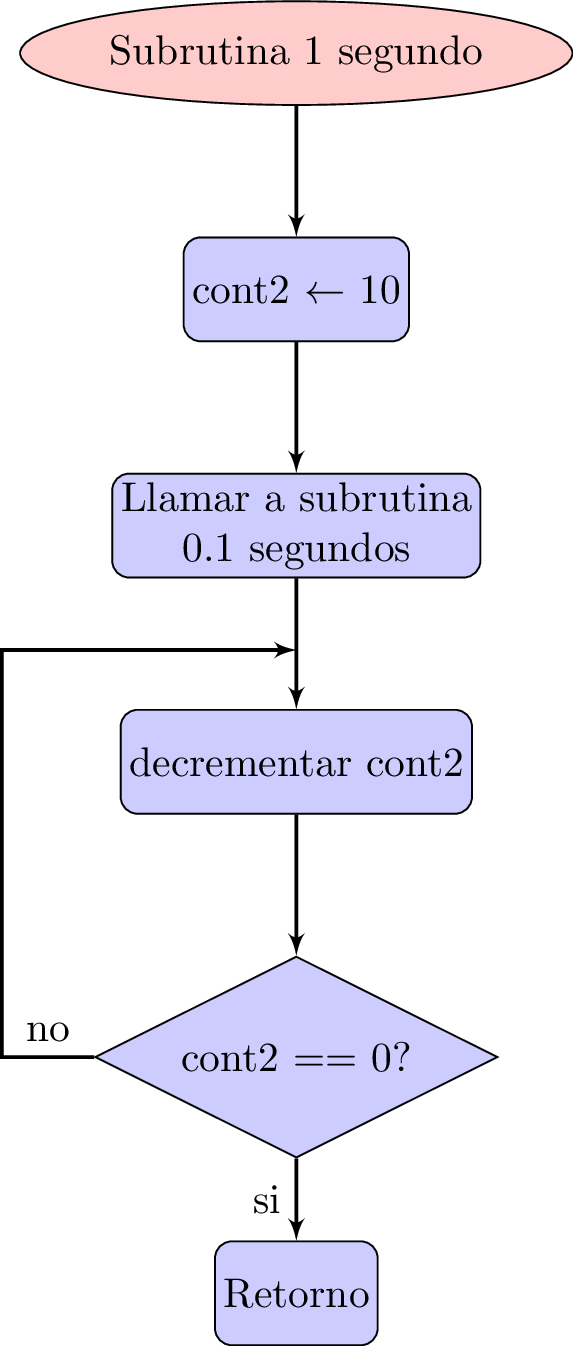
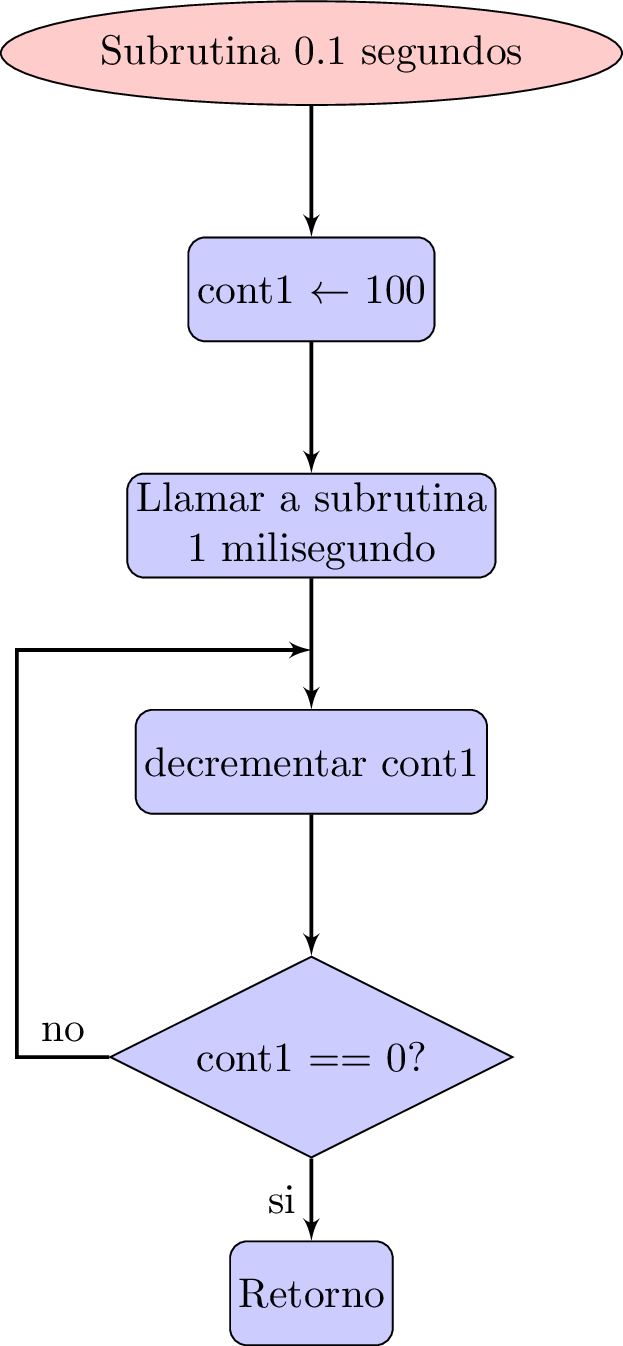
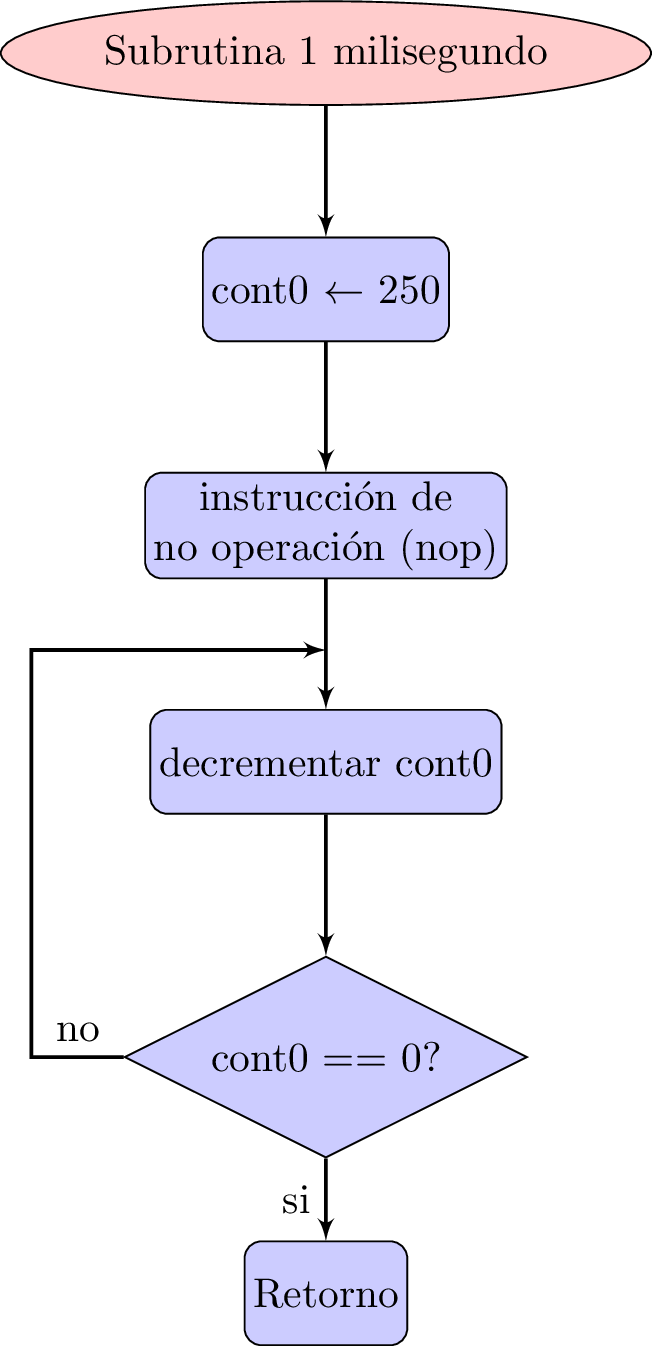
Diagrama de flujo
El diagrama de flujo de la implementación se encuentra divido en varias partes, la primera corresponde al programa principal, mientras que las restantes hacen referencia a cada una de las subrutinas para la realización de las temporizaciones mediante demoras delays.
Programa
El código en lenguage ensamblador es el siguiente:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
#include "p16f886.inc"
; CONFIG1
; __config 0xEFE5
__CONFIG _CONFIG1, _FOSC_INTRC_CLKOUT & _WDTE_OFF & _PWRTE_ON & _MCLRE_ON & _CP_OFF & _CPD_OFF & _BOREN_ON & _IESO_ON & _FCMEN_ON & _LVP_OFF
; CONFIG2
; __config 0xFFFF
__CONFIG _CONFIG2, _BOR4V_BOR40V & _WRT_OFF
cont0 EQU 20
cont1 EQU 21
cont2 EQU 22
;*******************************************************************************
; Reset Vector
;*******************************************************************************
RES_VECT CODE 0x0000 ; processor reset vector
GOTO START ; go to beginning of program
;*******************************************************************************
; MAIN PROGRAM
;*******************************************************************************
MAIN_PROG CODE ; let linker place main program
START
; TODO Step #5 - Insert Your Program Here
bsf STATUS,RP0 ;move to bank 3
bsf STATUS,RP1 ;move to bank 3
clrf ANSEL ;PORTA as digital I/O
bsf STATUS,RP0 ;move to bank 1
bcf STATUS,RP1 ;move to bank 1
MOVLW b'11111111' ;configure porta as input
MOVWF TRISA
MOVLW b'00000000' ;configure portb as output
MOVWF TRISB
BCF STATUS,RP0 ;move to bank 0
BCF STATUS,RP1 ;move to bank 0
CLRF PORTA
CLRF PORTA
main
bsf PORTB,RB0
call delay2
bcf PORTB,RB0
call delay2
goto main
delay0
movlw d'250'
movwf cont0
d0
nop
decfsz cont0,f
goto d0
return
delay1
movlw d'100'
movwf cont1
d1
call delay0
decfsz cont1,f
goto d1
return
delay2
movlw d'10'
movwf cont2
d2
call delay1
decfsz cont2,f
goto d2
return
END